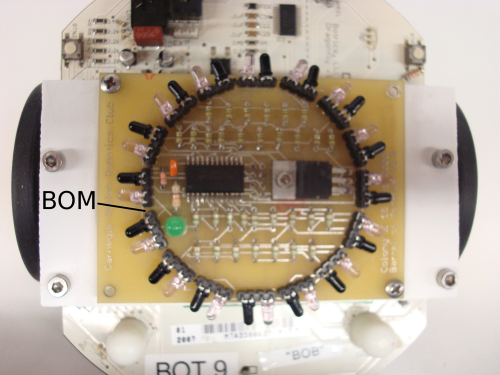
BOM¶
The BOM (Bearing and Orientation Module) is used to locate other robots and to figure out how far away they are.
Sample code¶
#include <dragonfly_lib.h>
/*
* Turns on the BOM so that other robots can find this one
*/
void BOM_on(void)
{
bom_init(BOM10); // must be called before using any BOM code
bom_on(); // turns on the BOM
}
#include <dragonfly_lib.h>
/*
* Searches for robots with their BOMs on in front of this one.
* If a robot is detected in front of this one, turns the orbs green.
* If there is no robot in front of this one, turns the orbs red.
*/
void find_robot(void)
{
orb_init(); // must be called before using any orb code
bom_init(BOM10); // must be called before using any BOM code
while(1) // repeat the following code in brackets forever
{
bom_refresh(BOM_ALL); // gets the newest values from each BOM detector
int bom = bom_get_max(); // gets the index of the BOM where the signal is strongest
// if the strongest signal is from detectors 2-6, then the other robot is in front of this one
if(bom >= 2 && bom <= 6)
orb_set_color(GREEN); // other robot detected - turn the orbs green
else // no robot in front of this one
orb_set_color(RED); // turn the orbs red
}
}
Header File¶
For a full list of functions, see the BOM code header file.
Debugging¶
Things to check/maintain:- Yellow ground wire is plugged in (picture)
- detector on 9, 10, 11, 12 were OK; the rest of the detectors needed to be reversed (see picture)
- wire harness
Schematics¶
Inputs to the BOM:
Output from the BOM: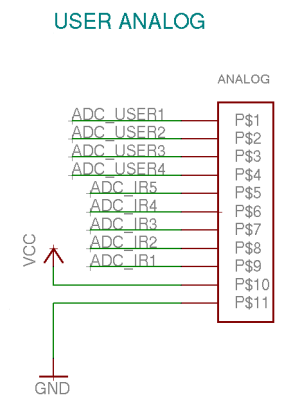
{kind=link}
{kind=link}
{kind=link}