Integrated BOM¶
UPDATED: 10-09-2010 to match rev5 hardware
Hardware¶
Using TV remote hardware - has excellent filtering to reject noise from fluorescent lights, other equipment etc.- Permits us to interact with other IR hardware
- Control a TV (Scout as a portable remote)
- Use a universal remote as a joystick
- IrDA data transfer from computers and PDAs
Driver code on ATMega128RFA1.
Transmitter¶
- TSAL6200 - recommended
- Supply Current: 100mA
- Viewing Angle: +/-17 deg (angle of half intensity)
- Peak Wavelength: 940nm
- Radiant Intensity = 500 mW/sr
- Recommended in receiver datasheet
Receiver¶
- TSOP1138 - what we are using
- Supply Current: 0.45mA
- Transmission Range: 45m
- Peak Wavelength: 950nm
- Directivity: +/-45deg
- TSOP4838 - what we currently have on the electronics shelf
- Supply Current: 1.1mA
- Transmission Range: 45m
- Peak Wavelength: 950nm
- Directivity: +/-45degrees
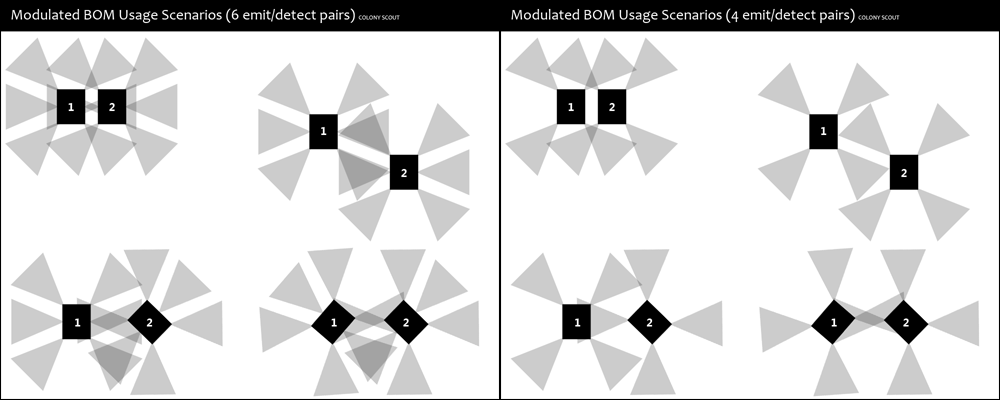
Central Concepts¶
- Build the BOM into the board to free up physical space above the robot
- Achieve communication between BOM IR sensors

Protocol¶
- Specialized version of the Sharp protocol @ 38kHz
- First 6 data bits: Robot ID (64 possible values)
- Last 2 data bits: Emitter Position (4 possible values)
- 1ms per 0 bit, 2ms per 1 bit, 13 bits per broadcast, 13-26ms per transmit cycle (per channel)
- 40ms delay between same command (we will broadcast the 4 channels round robin to conserve power @ any instant)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}