Added by Sam Dyment over 12 years ago
What do you think about configuration for the motors?
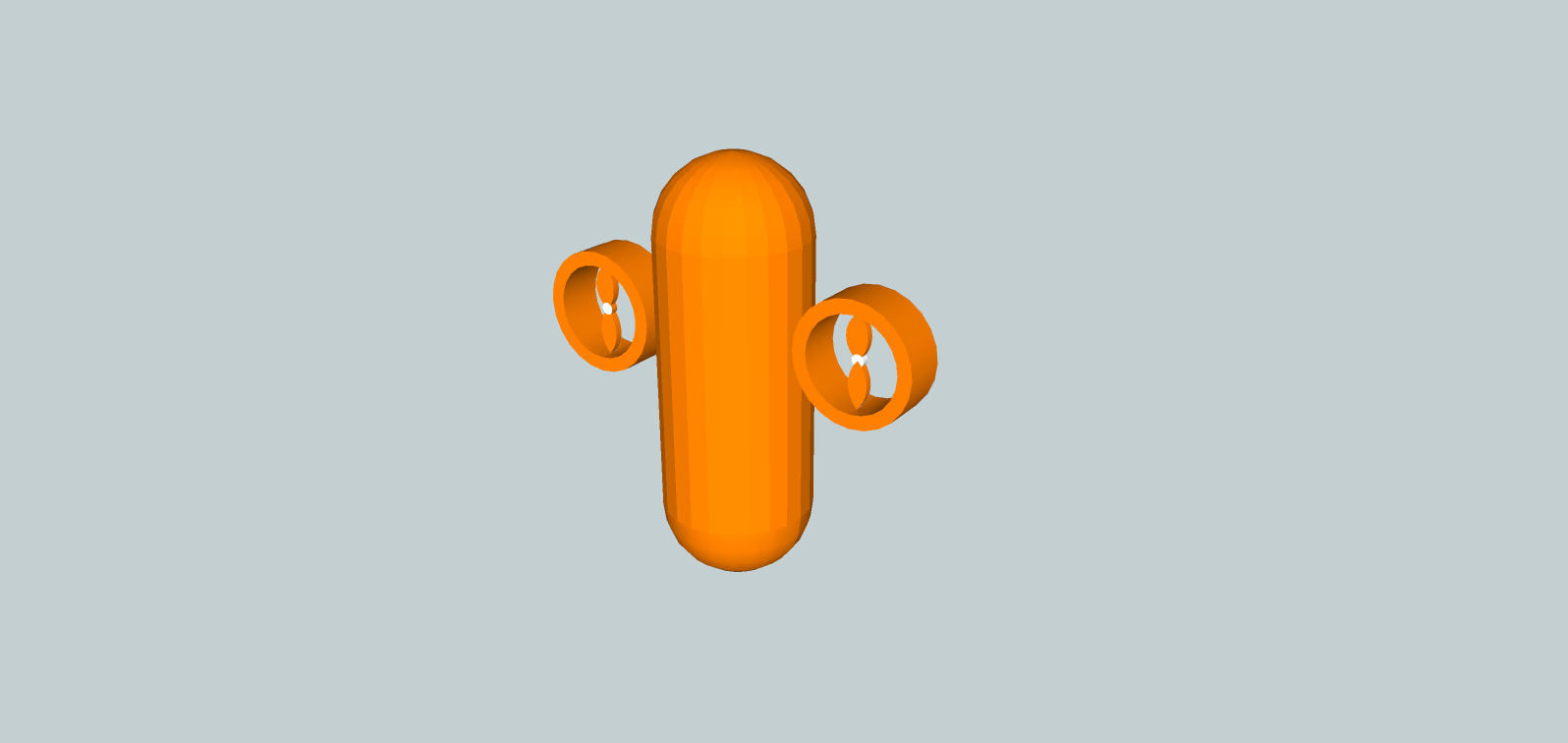
I kinda like this is the way to go:
Two motors with one ballast in the middle. It allows us to do more with very little. Assuming the robot stays upright, it can navigate up down and rotate with only 2 waterproof motors. Saves money and complexity.
What are your ideas?
USwarmIdea.png View (35.4 KB)
{kind=link}
{kind=link}