
Founded in 2013, Robobuggy began when Roboclub members dived into a dumpster for the remains of the original robobuggy used by AEPi and the CS department (Singularity). Since then, four robot buggies have been built, each aiming for the goal of a fully autonomous course completion during raceday and finishing faster than a human team. Robobuggy has had several teleoperated course completions as well as assisted autonomous rolls. After a brief pause during COVID years, Robobuggy is back! Now, the team is building our latest iteration, and with RTK GPS, we are pressing forth with achieving ever more reliable autonomous capabilities. In 2023, Short Circuit completed the course in 3:09.70, beating a human-driven buggy for the first time! If you want to join the team with the smallest driver and most LEDs in all of buggy history, stop by Roboclub in the UC basement anytime (we accept members from other teams too).
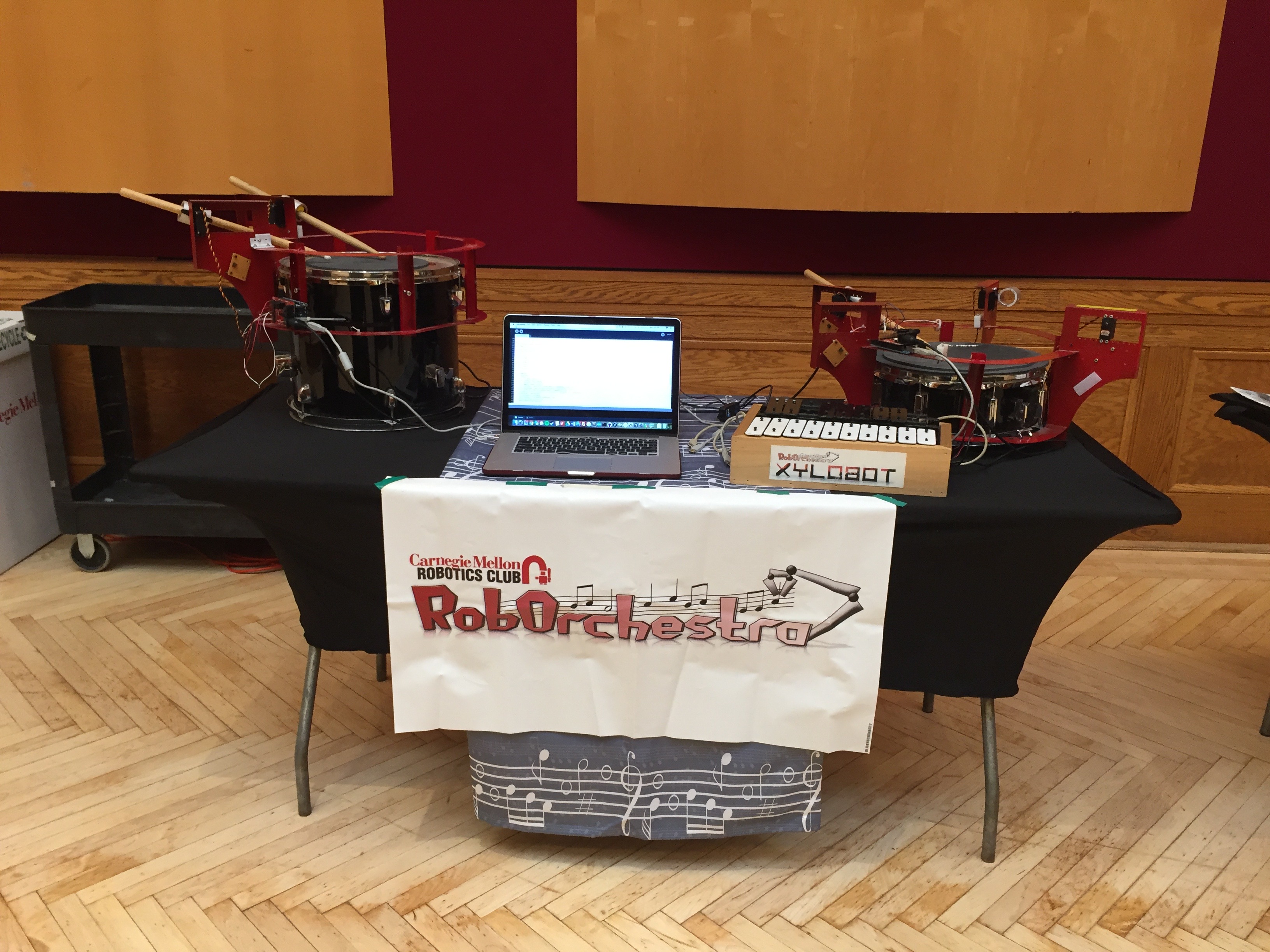
RobOrchestra aims to explore the creative possibilities for robotic instruments. We design, build and program robots that read music from MIDI data in order to put on musical performances. Our goal is to create a full robotic orchestra that is able to play from arrangements from standard MIDI files, and is also able to "improvise" unique polyphonic music in real time based off of music generation algorithms developed by our team.
Contact Info: dneiman@alumni.cmu.edu

This club project focuses on prosthetic hand research and development.
Contact Info: preethik@andrew.cmu.edu, janitesc@andrew.cmu.edu

ReFilament recycles scraps and supports from previous 3D prints into usable PLA filament. The ReFilament is split into three different processes: shredding, melting, and extruding, which all seamlessly integrate into a single automated track.
Contact info: wanyic@andrew.cmu.edu