Diagnostic Station¶
UPDATED: 10-17-2010
Now integrated into a charging station platform designed to accept (5) individual charging stations and combine into one large system.

Features:
4.3" Touch screen with Gumstix processor
Wireless connection to computer
12.5A 12VDC Power Supply (10A allocated to charging)
Tests for motors, encoders, gyroscope (dual axis), accelerometer, BOM
No known test for sonar, but should be included
wiring passes through dyno platform, connects to robot via accessory port
palo43 expansion board with LCD connects to computer via ethernet for data logging
powered USB hub breakout to all computers
5V switching regulator for electronics from 12V power supply
robot power is provided from station - unplug battery and replace with station connector. this is done to minimize differences from battery state of charge, etc. More tests should be done to ensure we aren't missing issues that only crop up on battery power.
Separate battery test?
Note: After talking to Kwoo, we'd need to initiate a software reset of the battery fuel gauge, and it may get "confused" if we switch back and forth between battery power and wall power sources.
Dyno/Pitch Test¶
- (4), 1" OD rollers with embedded magnets
- (4) 8-bit hall effect sensors on custom pcbs
- 422 ticks per revolution of each dyno roller
- (2) 12-bit hall effect sensors on custom pcbs
- Yaw and pitch measurement, 0.0875deg resolution
- (1) RS-370 motor link for gyro pitch
- (1) potentiometer for position feedback
Yaw Test¶
- (1) custom acrylic 10" 100 tooth spur gear
- (1) 10" aluminum baseplate
- (1) RS-370 motor with 10 tooth spur gear
BOM Test¶
- (1) bom sensor pair
Tests¶
- sinusoidal input to yaw and pitch (non-simultaneously)
- increasing frequecy, increasing amplitude
- static angle displacments
- mostly useful for accelerometer
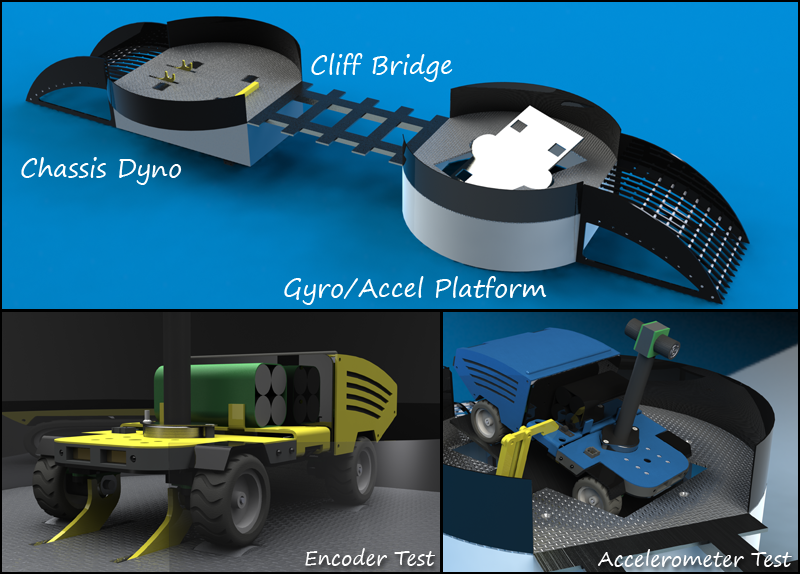
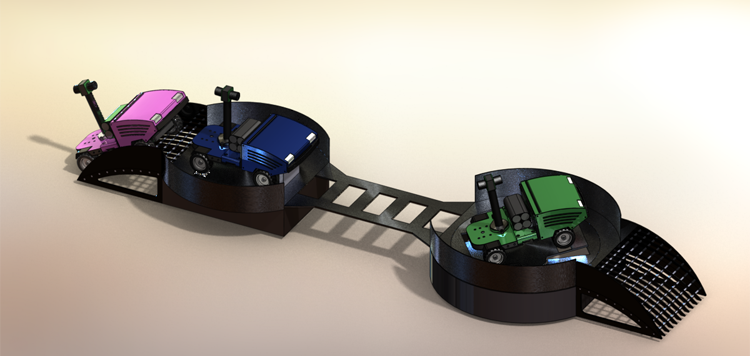
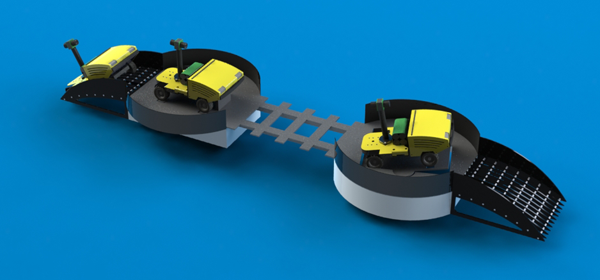
Assuming the robot can navigate to the station, it will ascend the ramp and proceed through the three stages. All tests and robot maneuvers are controlled by the Colony server, which handles scheduling and task assignments for all the robots.
Stage 1: Chassis Dyno & rBOM Tester
The motors and encoders are tested across the speed range of the robot. A sequence of tests is also performed with loading on the dyno rollers. This simulates the robot driving across different terrains.
Stage 2: Cliff Bridge
Between the two larger stations, the bridge tests the three cliff sensors through several cycles (see ladder-like design). This comes after the encoders/motors are calibrated for straight line driving.
Stage 3: Gyro & Accelerometer Station
The final and most complex station latches onto the robot and spins it for gyro testing. Accelerometer tests are also performed by spinning and tilting the robot.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}