WirelessLibrary¶
Work on this in the wireless branch.
- WirelessLibrary
- Notes from spring 2010 work
- Public API
- Redoing Wireless
- Code compiles now, so write test cases and test on the robot - 1/20/10
- Divide work into separate sections - 11/23/09
- New Wireless API - Chris, David, Ben, Evan - 11/18/09
- Wireless Architecture - James, Chris, Brad, David, Evan, Ben & BRIAN - 11/11/09
- Discussion - James, Chris, Brad, David, others - 11/4/09
- The UDP/TCP Approach - David - 11/2/09
Notes from spring 2010 work¶
- Debug options
- should move this to makefile, or a command option when running makefile (make debug?)
- buffer size
- this is currently set to 250 bytes
- should try to lower this and find ideal size
- doxygen
- needs to be posted on redmine
- ackreset()
- needs to reset send_buffer as well
- ackhandle()
- case 0 should be right
- other cases have an error somewhere
- xbee_reset()
- not implemented yet
- should recover from any state, any mode, etc
- xbee_interrupt
- should check checksum
- need to implement user-level acking
- should implement high priority group handling
- should check checksum
- check_last_received()
- needs to be tested
- functions should all check that the library has been initialized
- basic packets
- there's some sort of bug with larger packet sizes
- comments
- go over comments and make sure they actually correspond to the functions that are written
- old libwireless functions
- see if you can make deprecated references from old function names to the new ones
- libdragonfly
- the copy in the branch does init() checking
- although not very well, since one of the init() calls is out of order
- currently doesn't run rangefinders correctly
- the copy in the branch does init() checking
- computer code in jar file in base folder of branch
- this is from my 15-437 webapps project
Public API¶
note: doxygen version of API is available in wireless branch (branches/wireless/docs/libwireless/html)
//send functions /** * The core send function. This will take all possible arguments and send all types of packets. * * @param data pointer to the byte array of data to be included in the packet * @param length the length of the data array * @param group the packet group of the packet * @param scope flag for sending global packet or your current PAN * @param dest robot ID (for robot to robot packet) * @param mode flag for using FAST or RELIABLE sending * * @return positive packet number for tracking acks, or error code **/ int16_t wl_send(uint8_t *data, uint8_t length, uint8_t group, uint8_t scope, uint16_t dest, uint8_t mode) /** * Wrapper for core send function that will send a global packet across the current channel. * * @param data pointer to the byte array of data to be included in the packet * @param length the length of the data array * @param group the packet group of the packet * * @return positive packet number for tracking acks, or error code **/ int16_t wl_send_global(uint8_t *data, uint8_t length, uint8_t group) /** * Wrapper for core send function that will send a packet across the current channel on the current pan. * * @param data pointer to the byte array of data to be included in the packet * @param length the length of the data array * @param group the packet group of the packet * * @return positive packet number for tracking acks, or error code (TBD) **/ int16_t wl_send_pan(uint8_t *data, uint8_t length, uint8_t group) /** * Wrapper for core send function that will send a packet across the current channel to a specific robot. * * @param data pointer to the byte array of data to be included in the packet * @param length the length of the data array * @param group the packet group of the packet * @param dest robot ID (for robot to robot packet) * @param mode flag for using FAST or RELIABLE sending * * @return positive packet number for tracking acks, or error code (TBD) **/ int16_t wl_send_robot(uint8_t *data, uint8_t length, uint8_t group, uint16_t dest, uint8_t mode) /** * Default (i.e. basic) send wrapper. * * @param data pointer to the byte array of data to be included in the packet * @param length the length of the data array * * @return positive packet number for tracking acks, or error code (TBD) **/ int16_t wl_send_basic(uint8_t *data, uint8_t length)
// TCP Acknoledgment (ACK) functions
/**
* acknowledgment error
* check if any of the packets you have sent have been lost.
*
* note that all other error checking will be handled by library,
* so your user behavior won't have to worry about it
*
* @return the # of packets lost (up to 255)
**/
uint8_t wl_ack_error(void)
/**
* acknowledgement error check
* check if a specific packet has been lost
* note: buffer will overflow every 255 packets
*
* @param packet packet number
*
* @return {SENDING,ACK_OK,ACK_FAILURE,CCA_FAILURE}
**/
int8_t wl_ack_check(uint8_t packet)
/**
* acknowledgement reset
* reset the acknowledgement buffer
**/
void wl_ack_reset(void)
// receive functions /** * the main receive function (similar to wl_do) * * when called, this function will receive the next packet on the default packet group * it will also dispatch registered packet handler functions for any other packet groups it has received * * @param data an already-initialized array to store the default group packet data in * @param length the length of the initialized data array * * @return the length of the used portion of data array or error (<0) **/ int8_t wl_get(char *data, uint8_t length) /** * function to receive only packets on the default group * this function is only meant to receive packets sent using wl_send_basic() * * @param data an already-initialized array to store the default group packet data in * @param length the length of the initialized data array * * @return the length of the used portion of data array or error (<0) **/ int8_t wl_get_basic(char *data, uint8_t length) /* * function to dispatch all registered packet handlers for received packets on non-default groups * * @return error codes */ int8_t wl_dispatch(void)
// packet handler registration functions /** * function to register new packet handlers (for non-default groups only) * * @param group the packet group number of the packets to handle with this function * @param func the function pointer to the user-specified packet handler * @param priority flag to set the priority of the function handler * * @return 0 on success, or error code **/ int8_t wl_register_handler(uint8_t group, FNPTR, uint8_t priority) /** * function to unregister existing packet handlers (for non-default groups only) * * @param group the packet group number of the handler to unregister * * @return 0 on success, or error code **/ int8_t wl_unregister_handler(uint8_t group)
// library initialization and termination /** * initialization function: * set up xbee communication and packet handler infrastructure * * @return 0 on success, or error code **/ int8_t wl_init(void) /** * termination function: * end xbee communication, deregister all handlers, etc * * @return 0 on success, or error code **/ int8_t wl_terminate(void)
Redoing Wireless¶
Wireless programming (high level code) needs to be redone. (xbee.c should be mostly fine)
Code compiles now, so write test cases and test on the robot - 1/20/10¶
- Test Cases
- Xbee testing
- test init - (PASSED - 1/20/10)
- test terminate
- test API mode 0
- command testing
- low level send
- low level receive
- test API mode 1
- command testing
- send packet
- receive packet
- test API mode 2 (not finished yet)
- command testing
- send packet
- receive packet
- Wireless testing
- sending
- test send global
- test send pan
- test send individual robot
- test send basic
- receiving
- test receive global
- test receive pan
- test receive individual robot
- test receive basic
- packet groups
- test add/delete packet groups
- test send/receive packet groups
- sending
- Xbee testing
Divide work into separate sections - 11/23/09¶
- Send Functions
- Core send function - David
- Send wrappers - Ben
- Ack system - David
- Receive Functions
- Dispatch - Abe
- Basic - Abe
- Common Functions
- Init, Terminate - Chris
- Packet group handler registration - Chris
- Xbee Functions
- integrate serial.c xbee functions into xbee.c - Evan
- other maintenance - Evan
- modify receive interrupt - David
- Wireless behaviors/tools
- high level ack system - Ben
- other robot will explicitly ack packets in a set packet group (super reliable)
- xbee dongle interface program -
- will init xbee on computer, then wait for commands from user
- high level ack system - Ben
New Wireless API - Chris, David, Ben, Evan - 11/18/09¶
- packet structure
- frame ID (one byte)
- group # (one byte or part of one)
- data
- xbee.c is almost fine
- integrate serial.c xbee functions into xbee.c
- check for infinite waits
- rename xbee_set/get_channel() and xbee_set/get_pan() to be called from global namespace
- use API mode 2
- this means checking for the three escaped characters and dealing with that
- user-registerable functions to be called in interrupt (or when packet is received)
- send functions
- one core send function
- generate packet ID # (software check on 1 or 2 bytes), save entire frame for ACKing and retries
- check for escapeable characters (use API mode 2), set smaller max packet size
- specific wrappers to fill in defaults
- send global
- only UDP b/c XBee doesn't provide enough info, to be added later
- send to PAN
- only UDP
- send to robot
- arguments for TCP/UDP, group, data, length, (dest robot)
- super send function (default)
- defaults to send global TCP, main group
- can only send text (strings) - figure out string length (possible null character)
- for TCP mode
- only supported in robot-to-robot sending
- auto ACK
- only for robot-to-robot TCP
- handle in send file
- non-blocking ACK check
- receive interrupt will check ACK buffer if we receive a response (ACK) packet
- save number of retries for "no ACK" or "CCA failure" packets
- remove old un-ACKed packets from buffer after three software retries
- one core send function
- receive functions
- two types of returns to user
- default: basic string
- all relevant information (src robot, packet group, etc...)
- support registering function pointers (one per group)
- registration function will take three args: group number/name, function pointer, priority (i.e. handle this now)
- support registering function pointers (one per group)
- timeout handler
- check for repeat packet (save last 10 or so packet ID #s)
- if packet group is high priority, handle it now
- else, put it in buffer
- wl_do (renamed to wl_get_packet?) called by user
- check the buffer, check group of packet
- default to returning the buffer, can also call function pointers
- user behavior can trigger it with the rtc (re-write rtc to handle multiple function pointers)
- init with a more advanced version of wl_init()
- two types of returns to user
- init functions
- core init
- rtc arguments
- default to pre-existing channel, PAN
- wrapper function (default)
- don't register for rtc
- register function pointers after init
- core init
- files
- send
- receive
- common
- init functions
- computer code
- only difference is xbee.c
- focus on robot for now
Wireless Architecture - James, Chris, Brad, David, Evan, Ben & BRIAN - 11/11/09¶
- Lot's of discussion, see attached picture of whiteboard
- DSCF3451.JPG
- Eventually should be parsed into text here
- Chris will look at the Packet, ACK, and NACK headers for determining when they are fully received
- When a robot sends a packet, the XBee module sends a "TX Status" message back to the robot
- This packet includes the Frame ID (packet number) of the corresponding sent packet
- It also specifies three possible statuses
- 0 = Success
- 1 = No ACK received (packet was not received by destination)
- 2 = CCA Failed (packet was not sent - too much traffic on the network to send)
- David will look into re-transmits on the XBee and getting a list of other nearby active XBee IDs from the XBee
- Re-Transmits
- MAC Layer: fixed at 3 retransmit attempts (timeout = short)
- XBee: 0-6 retransmit attempts (default 0) (timeout = 200 ms)
- Library: whatever we want
- List of active Xbee IDs
- ND command (node discover)
- only finds ids on current channel and pan
- can scan all pans by switching to pan=broadcast before sending ND command
- defaults to 2.5s, can shorten to 100ms
- AS command (active scan)
- can scan all channels and pans
- returns a ton of information
- takes a while (0.18s - 50min) since it uses an exponential timeout
- ND command (node discover)
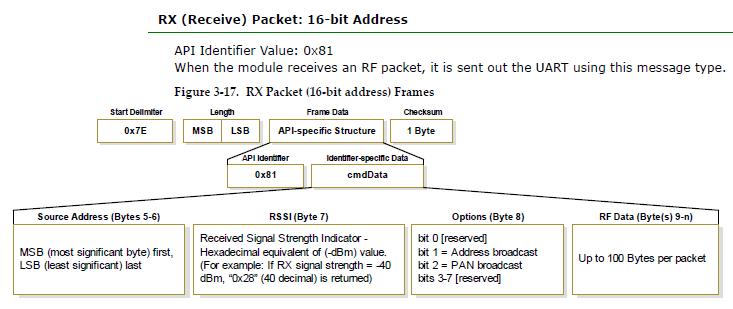
- Take a look to see what a received data packet looks like
- To clarify sending rules:
- you can send to an individual robot on the PAN, or all robots on the PAN
- or an individual robot anywhere on the channel, or all robots on the channel
- Also, to clarify the hardware acks, this is sent by the MAC layer upon successful receipt of any robot-to-robot packet, unless it is specifically not requested. For sending to an entire PAN or channel, no ack is sent. The sender (application layer) will get a transmit response packet with the success or failure of the ack.
- packet corruption or dropped packets will incur the sending timeout and be counted as ack failure
- CCA failure (network is too busy to send packet) is another failure code (we might want to consider switching to a different channel in this case)
- notes on xbee transmit speed:
- 9600 baud sends at 2-3 kB/s
- 115200 baud sends at 14.6 kB/s
- by my calculations, the atmega128 is running at 2 Mhz. If this is wrong, please tell me
- Re-Transmits
{kind=link}
{kind=link}
Discussion - James, Chris, Brad, David, others - 11/4/09¶
- High Priority
- change channel for private communication
- for high bandwidth situations
- timeout with keepalives to reset channel
- separate robot and computer code
- shared headers, and separate headers and c files
- channel partition
- see here
- Time-dependent
- some packets need to be handled immediately (token ring)
- trigger interrupt
- other packets can wait a bit
- program dependent (wl_do)
- some packets need to be handled immediately (token ring)
- Programming Header (1 byte)
- Group (5 bits)
- Priority (1 bit)
- (2 reserved bits)
- Do we need to worry about escaping characters?
- Remove packet type (only have group to differentiate packets)
- user can define other parameters and transmit them in the data
- Max Packet Length
- ~100 char buffer limit
- trigger interrupt if we reach the limit
- Handling Packets
- include default handlers for certain groups of packets
- ex) default sending/receiving strings, ColoNet,
- allow user to define their own groups and handlers
- handle response to sent packet within library
- attempt to resend packet if it was lost, etc...
- include default handlers for certain groups of packets
The UDP/TCP Approach - David - 11/2/09¶
- Implement basic UDP messaging
- Basic Idea
- Allows packets to be received by all robots on a channel
- No verification of success or failure
- Why this is a good thing
- Many things, like the sensor matrix data, should be sent to all robots anyway
- This avoids any delays caused by sending and checking for acks
- Implementation Details
- This is very simple, just change the packet destination to XBEE_BROADCAST
- Can send a string directly through xbee_send_packet()
- Basic Idea
- Implement pseudo-TCP messaging
- Basic Idea
- Reliability
- Error-free
- If we wanted, we could also do ordered data, congestion control, etc
- Why
- Wireless likes to drop packets, or otherwise have problems
- This would mostly take care of those issues
- Implementation Details
- Use something similar to TCP, but cut down the header size significantly
- If we consider each packet as a self-contained message and don't care about order, we don't have to open or close a connection, just make sure this packet number is unique
- Sending packets and checking acks/resending would be handled by the library
- For packet groups, would just need a character to distinguish the packet group and a receive handler.
- Basic Idea
{kind=link}
{kind=link}