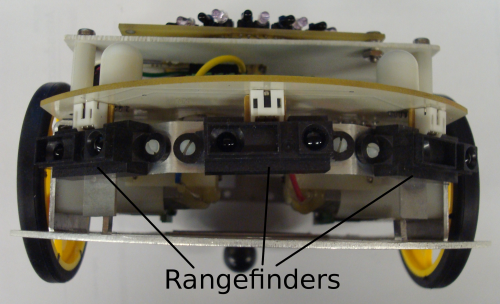
Rangefinders¶
The rangefinders are used to detect any objects that are near the robots. The robots have three rangefinders in front and two in the back.

Sample code¶
#include <dragonfly_lib.h>
/*
* Turns the orbs red when something is in front of them and
* green when nothing is in front of them.
*/
void rangefinder_sample(void)
{
range_init(); // must be called before using the rangefinder code
orb_init(); // must be called before using the orb code
while(1) // repeat the following code in brackets forever
{
int distance = range_read_distance(IR2); // gets the distance of the nearest object as read by rangefinder 2
if(distance > MIN_IR_ADC8) // if the distance is larger than MIN_IR_ADC8, the rangefinder sees an object
orb_set_color(RED); // sets the orb color to red
else
orb_set_color(GREEN); // sets the orb color to green
}
}
Header File¶
For a full list of functions, see the rangefinder code header file
Hardware Documentation¶
More details about how the rangefinders work: Rangefinders details
Debugging¶
If the rangefinders are not working, see the rangefinder debugging guide: Rangefinders Debugging
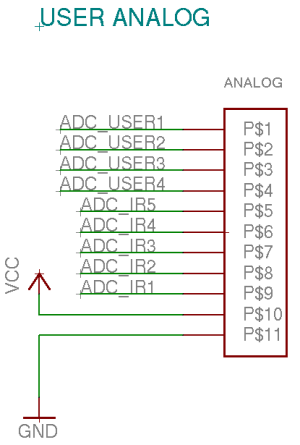
Schematic¶
{kind=link}
{kind=link}
{kind=link}